体素下采样:减少点数量的同时,保持点云形状特征基本不变,同时基本上保留了空间结构信息。
1. 概念与原理
- 体素:三维空间中的一个小立方体单元,类似于二维图像中的像素,但它表示的是三维空间中的一个区域。
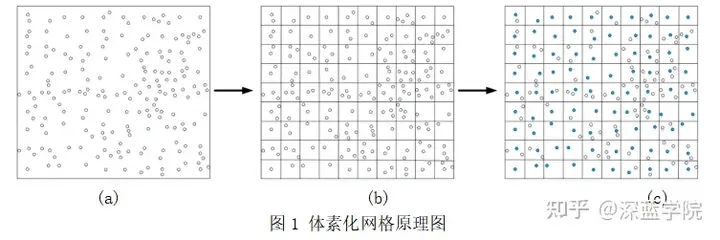
- 体素网格化:将点云中的空间划分为固定大小的三维体素网格。每个体素中可能包含多个点。
- 下采样过程:
- 为点云设置一个体素大小,将整个点云的空间划分为多个相同大小的立方体区域(体素)。
- 对于每个体素,将所有落在该体素中的点进行聚合处理(例如,计算这些点的质心或平均值),并用一个点来代表该体素中的所有点。
- 体素中的点被简化为一个点后,其它点被舍弃,从而减少了点云数据的规模。
2. 作用
- 减少数据量:原始点云数据通常包含大量点,进行体素下采样后,点的数量大大减少,提升处理速度和存储效率。
- 保留几何特征:虽然点的数量减少,但因为每个体素中的多个点被聚合为一个点,点云的整体几何结构(如形状和轮廓)仍然保留。
- 加快处理速度:在后续的处理任务(如点云配准、分割、分类等)中,由于点的数量减少,计算时间也随之缩短。
3. 应用场景
- 点云数据预处理:减少数据规模,以便于在计算资源有限的设备上进行进一步的分析或处理。
- 点云可视化:通过下采样减少渲染的点数,改善点云在图形界面中的显示效率。
- 点云配准:在进行点云配准(如 ICP 算法)时,体素下采样可以帮助减少计算量,提高配准速度。
4. 示例与使用方法
使用常见的点云处理库,如 PCL(Point Cloud Library)或 Open3D,可以轻松实现体素下采样。以 Open3D 为例:
| |
在这段代码中,voxel_size 用来控制体素的大小,值越小,保留的细节越多,点的数量越多;值越大,简化程度越高。
5. 核心原理总结
- 体素下采样是通过在三维空间中对点云进行网格化并将每个网格内的点合并为一个代表点来降低点云的分辨率。
- 这种方法在减少数据量的同时,保留了点云的主要形状特征,因此是一种高效的点云数据简化方法,适用于后续处理或可视化任务。